Changer de langue :
drylin T - Conception du système, horizontal, 1 rail et 1 chariot
2ème étape :
Vérifier si les distances entre les forces appliquées se situent dans les valeurs admissibles (voir distances maximales admissibles).
| variante : | 1 rail | 1 chariot |
|---|---|---|
| sy + sz | < | 2 Lx - Y0 |
| ay + az | < | 2 Lx - Y0 |
| sy | < | 5 Zm |
| sz | < | 5 Zm |
3ème étape :
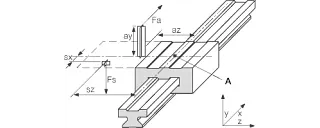
A = origine des coordonnées
Calcul de la force d'entraînement nécessaire




Variables dans les calculs
| Fa : | Force motrice | [N] |
| Fs : | Force d'inertie | [N] |
| Fy, Fz : | Charge du palier dans la direction y ou z | [N] |
| sx, sy, sz : | Distance de la force d'inertie dans les directions x, y ou z | [mm] |
| ay, az : | Distance de la force d'entraînement dans la direction y ou z | [mm] |
| wx : | Distance entre les chariots sur un rail | [mm] |
| LX : | constante dépendant de la taille | [mm] |
| Zm : | constante dépendant de la taille | [mm] |
| Y0 : | constante dépendant de la taille | [mm] |
| b : | Distance entre les rails de guidage | [mm] |
| µ : | Coefficient de frottement, µ = 0 pour les charges statiques, µ = 0,2 pour les charges dynamiques | |
| ZW : | Nombre de chariots par rail |
4ème étape :
Calcul de la charge maximale du palier


Les valeurs constantes
| Référence de commande | LX [mm] | ZM [mm] | Y0 [mm] |
|---|---|---|---|
| TW-01-15 | 29 | 16 | 11,5 |
| TW-01-20 | 35 | 23 | 15,0 |
| TW-01-25 | 41 | 25 | 19,0 |
| TW-01-30 | 49 | 29 | 21,5 |
Coefficients
| 1 rail, 1 chariot | |
|---|---|
| K1 | |(ay+Y0)/Lx| |
| K2 | (sy+Y0)/Lx |
| K3 | |az/Lx| |
| K4 | |sx/Lx| |
| K5 | sz/Lx |
| K6 | |(sy+Y0)/Zm| |
| K7 | |sz/Zm| |
5ème étape :
Vérifier la charge maximale du roulement le plus chargé avec la charge calculée à l'étape 4.
Charge maximale autorisée
| Référence de commande | Fymax, Fzmax [N] |
|---|---|
| TW-01-15 | 2 000 |
| TW-01-20 | 3700 |
| TW-01-25 | 5 000 |
| TW-01-30 | 7000 |
6e étape :
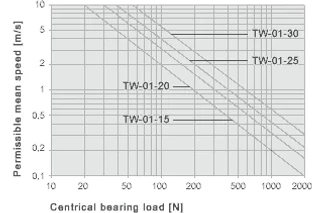
Diagramme permettant de déterminer la vitesse maximale admissible pour la charge du palier déterminée.
X = charge centrée du palier [N]
Y = vitesse moyenne autorisée [m/s]
Détermination de la vitesse maximale autorisée pour la charge de l'étape n° 4
Contactez-nous
Des questions ou des informations sur le produit ? Veuillez contacter :

Service Client
Service client :
Téléphone : du lundi au vendredi de 8h00 à 20h00
Chat en direct : 24 heures sur 24
Réserver un appel
Prendre rendez-vous avec un expert produit