robolink® W FAQ's – Verbindingsconstructieset voor robots
Frequently Asked Questions
1) Welke typen igus® verbindingen zijn uit voorraad leverbaar?
Momenteel zijn er 6 verschillende standaard verbindingen
1 – RL-50-PL1: draaiverbinding2 – RL-50-TL1: roterende verbinding
3 – RL-50-001: a 2-assige verbinding met zwenkbereik van +/-90° ("DE klassieker")
4 – RL-50-002: a 2-assige verbinding met zwenkbereik van +130°/-50° ("asymmetrisch")
5 – RL-50-003: a 2-assige verbinding met zwenkbereik van +180°/0° ("vouwbaar")
6 – RL-90-BL1: Basisverbinding met 2 assen, ("grote en sterker")
Daarnaast kunnen speciale versies van de verbindingen worden geleverd indien nodig.
2) Welke hoekinstellingen zijn mogelijk? Eigen gewichten? Koppels?
De volgende lijst biedt informatie over basisgegevens. U kunt deze tabel ook in onze catalogus vinden.| Ordernummer | Nummer Kabels |
Draai hoek |
Rotatie hoek |
Gewicht | Max. belasting | ||||
|---|---|---|---|---|---|---|---|---|---|
| Eigen aandrijving |
Mogelijke door- voer |
Standaard (met aanslag) |
Optie (*zonder aanslag) |
Standaard (met aanslag) |
Optie (*zonder aanslag) |
[gr] | Scharnierend [Nm] |
Roterend [Nm] |
|
| 1. Scharnier verbinding RL-50-PL1 |
2 | 4 | 180° (±90°) | 210° (±105°) |
- | - | 235 | 12 | - |
| 2. Roterende verbinding RL-50-TL1 |
2 | 8 | - | - | 340° (±170°) |
540° (±270°) |
245 | - | 5 |
3. 2-assige |
4 | 4 | 180° (±90°) |
210° (±105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
4. 2-assige |
4 | 4 | 180° (+130°/-50°) |
240° (+135°/-105°) |
340° (±170°) |
540° (±270°) |
345 | 12 | 5 |
| 5. 2-assige verbinding RL-50-003 |
4 | 4 | 180 ° (+180°/0°) |
235° (+180°/-55°) |
340° (±170°) |
540° (±270°) |
400 | 12 | 5 |
| 6. Basis verbinding RL-90-BL1 |
4 | 8 | 180° (±90°) |
190° (±95°) |
180° (±90°) |
- | 1250 | 20 | 10 |
3) Hoe kunnen de verbindingen worden gecombineerd?
Elke individuele verbinding is gemonteerd met trekkabels. In elk geval moeten ze door de onderliggende verbinding worden gehaald. Dit betekent dat niet elke combinatie van verbindingen mogelijk is. Echter, het is mogelijk afzonderlijke verbindingen te combineren met 1 tot 6 DOF's en zeer verschillende kinematica te implementeren. Wij adviseren u graag. De volgende illustratie laat enkele van de combinaties zien, waarbij er talloze nieuwe mogelijkheden zijn wanneer de nieuwer typen verbinding, d.w.z. de RL-50-003 en RL-90-BL1, worden beschouwd!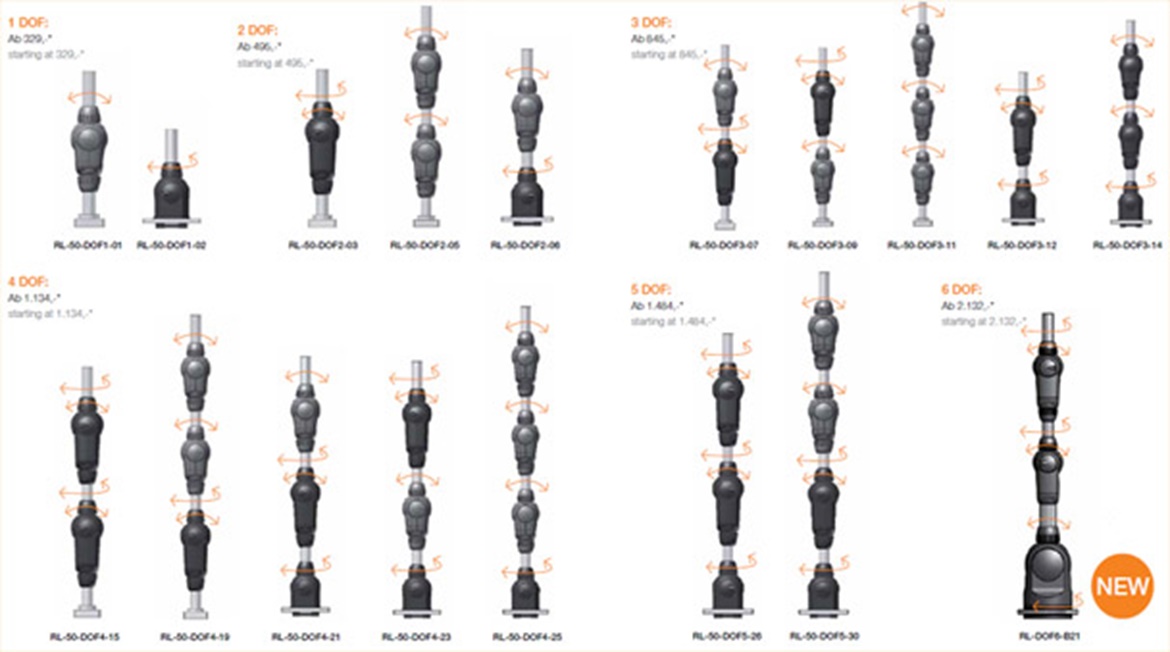
4) Wat betekent de term "modulaire set systeem"?
Het basisidee van de robolink® modulaire constructieset is het aanbieden van individuele (mechanische) componenten welke klanten kunnen gebruikt om een robotsysteem te bouwen. Afhankelijk van de complexiteit van hetgeen is vereist, kunnen gelede armen van verschillende mate van complexiteit worden geconfigureerd en besteld. igus® produceert de armen in overeenstemming met de aanwijzingen van de klanten en levert aansluitklare units. Echter, het is niet mogelijk om gewoon afzonderlijke verbindingen te koppelen (zoals bijv LEGO® stenen").5) Waarom kunnen gelede armen zelf niet eenvoudig worden gemodificeerd?
Alle verbindingen worden bediend met trekkabels. 2 draden zijn nodig voor elke vrijheidsgraad (antagonistische principe). Wanneer de draden van de bovenste verbinding (2) naar de onderste verbinding geleide zouden worden (1) zonder geleiding, dan zouden de bewegingen van de twee verbindingen niet langer onafhankelijk van elkaar zijn. Om deze onafhankelijkheid te realiseren, is het nodig dat de draadspanning van de bovenste verbinding (2) wordt losgekoppeld van de bewegingen van de onderste verbinding (1). Dit wordt gedaan door middel van een speciaal Bowden-kabelsysteem in de opening van de onderste verbinding (zie illustratie). De draden bewegen dan vrij naast elkaar in de verbindingsbuizen naast de verbindingen.Wanneer multi-as gelede armen worden besteld bij igus, dan zijn alle Bowden-kabel elementen van te voren gemonteerd en wordt het hele systeem altijd aansluitklaar geleverd, d.w.z. met alle kabels en buizen in de gewenste configuratie.

Pneumatische slang (grijper)
2Viervoudige Bowden-kabel
3Sensorkabel - verbinding 2
44 kabels bewegen vrijelijk in de tub
5Enkelvoudige Bowden-kabel voor rotatie
68 kabels bewegen vrijelijk in de tub
6) Welke kabelafstanden/krachten zijn nodig om de verbindingen te bewegen?
De werkpunten van de kabels binnenin de verbindingen wordt gedefinieerd aangeduide maat:RL-50: Effectieve diameter 50 mm (roterende en scharnierende beweging)
RL-90: Effectieve diameter 90 mm (scharnierende beweging), of 120 mm (roterende beweging)
De kabelafstand voor een RL-50 verbinding wordt daarom als volgt berekend
π x d/4 ≈ 39 mm voor een haakse beweging van 90°
π x d/2 ≈ 79 mm voor een haakse beweging van 180°
De trekkrachten van de kabels (afhankelijk van de uitgeoefende koppels) kunnen tot wel 600 N zijn.
7) Wat omvat de leveringsomvang van een verbinding?
Geassembleerde verbinding van kunststof (PA 2200), incl. lagerlocaties (hard-geanodiseerd aluminium = standaard)
Dyneema kabels
Aluminium staven (standaard = 100 mm inbegrepen in elk geval, speciale lengten op aanvraag)
Hoeksensoren als optie (-WS), 3 m sensorkabel, gemonteerd en getest. Draadnippels als aansluitmateriaal gratis zoals overeengekomen met de klant.
8) Wat is inbegrepen in de leveringsomvang van een gelede arm?
Alle verbindingen voorgeassembleerd overeenkomstig punt 7)
Alle kabels doorgehaald met speciale Bowden-kabel segmenten overeenkomstig punt 5)
Aluminium buizen tussen de verbindingen, op maat gemaakt overeenkomstig de wensen van de klant
Montageplaat bij de voet van de arm
Sensorkabels doorgehaald (optie -WS), 3 m sensorkabel gemonteerd en getest in elk geval. Draadnippels als aansluitmateriaal gratis zoals overeengekomen met de klant.
9) Wat is inbegrepen in de levering van een "compleet systeem"?
Gelede arm zoals beschreven in vraag 6), maar ook MIT aandrijfunit bestaande uit:igus® stappenmotoren, aantal overeenkomstig het aantal assen op de arm
Planetaire tandwielkast voor elke motor
"Aandrijfwiel" voor aansluiting van de kabels op de aandrijving
"Spangereedschap" voor gemakkelijke herspanning van de aandrijfwielen
Verschillende versies van de behuizing waarin motoren worden gemonteerd en waarop de arm wordt gemonteerd zijn beschikbaar
Het volgende in NIET inbegrepen:
Gripper (optioneel verkrijgbaar via igus®, andere producten ook aanpasbaar)
Besturingscomponenten
Motorkabels (optioneel beschikbaar via igus®)
10) Welke hoeksensoren worden gebruikt?
In de verbindingen zitten incrementele hoeksensoren (optioneel) van Austriamicrosystems (AS5304A). Absoluutencoders zijn momenteel technisch niet mogelijk. Om de nulpositie te definiëren, gebruiken we een Hall-sensor die zich in het midden van het scharnierende/draaiende bereik van een verbinding bevindt. Dit betekent dat elke verbinding eerst moet worden "geïnitialiseerd" wanneer de voeding wordt ingeschakeld. Meer informatie over de bedrading van de sensoren en de adertoekenning vindt u in onze technische documentatie.De resolutie van de encoders is (verschillend in de verschillende verbindingen!):
4640 signalen / 360° in het geval van alle rotatie-bewegingen van verbinding maat RL-50
(29 poolparen x 160 signaal / poolpaar) ≈ 0,078°
4960 signalen / 360° in geval van alle scharnierende bewegingen van verbindingsmaat RL-50
(31 poolparen x 160 signalen / poolpaar) ≈ 0,073°
9920 signalen / 360° in geval van alle bewegingen van verbinding maat RL-90 ("Basis")
(62 poolparen x 160 signalen / poolpaar) ≈ 0,036

Hall-sensor voor rotatiebeweging
2Encoder voor roterende beweging
3Encoder voor scharnierende beweging
4Hall-sensor voor rotatiebeweging
Magnetische incrementele hoeksensoren. De sensoren hebben een resolutie van ~0,07° per as. Alle sensorunits zijn installatiegereed voor de betreffende verbindingen. Elke met 3 m sensorkabel (6 kabels voor elke DOF)
11) Kunnen gelede armen ook in water worden gebruikt?
Ja, de componenten bestaan in principe uit kunststof (PA2200), geanodiseerd aluminium, roestvast staal (bouten), Dyneema kabels (PE), messing draadnippels. Ingegoten sensoren kunnen worden besteld (-SE = geSealde Encoder).

12) Welke typen aanvrijving zijn mogelijk?
Uiteenlopende aandrijvingen kunnen worden gebruikt voor de kabels. Mogelijkheden zijn bijv. handaangedreven aandrijvingen ("hefbomen"), pneumatische componenten (bijv. pneumatische spieren) of elektromotoren (BLDC-motoren, DC-motoren, servomotoren, lineaire motoren, stappenmotoren). igus® kan stappenmotoren leveren met planetaire tandwielkasten als mogelijk aandrijfconcept. De volgende zijn beschikbaar:- NEMA23 stappenmotor (gevlochten draad of connectorversie) met 1:16 planetaire overbrenging
- NEMA17 stappenmotor (gevlochten draad of connectorversie) met 1:35 planetaire overbrenging
Stappenmotor
2Planetaire tandwielkast
3Spanbaar aandrijfwiel

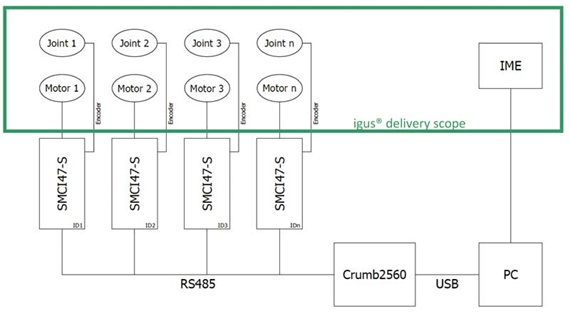
13) Hoe worden robolink® gelede armen bestuurd?
igus® ontwikkelt, bouwt of verkoopt geen besturingselementen. De leveringsomvang van een robolink® systeem is beperkt tot of de gelede arm of de gelede arm met "aandrijfunit".Besturingscomponenten moeten door de klant zelf worden geleverd of gekocht.
14) Wat moet ik bestellen om de IME (igus motion editor) open-source software of igus® te kunnen gebruiken?
De software kan gratis worden gedownload. De software heeft de vorm van een grafische gebruikersinterface waarmee eenvoudige bewegingen kunnen worden geprogrammeerd en opgeslagen. Een contouring besturingssysteem (of inverse kinematica) is niet inbegrepen.15) Welke materialen worden gebruikt?
Verbindingen: Polyamide PA 2200 componenten, roestvast stalen bouten, lagerringen gemaakt van hard-geanodiseerd aluminium, alternatief iglidur® J of roestvast staal.Verbindingsbuizen: Geanodiseerd, alternatief GRP of CRP
Kabels:Dyneema kabels, draadeindnippels gemaakt van messing.
16) Welke grijpers kunnen worden gebruikt?
"Alle mogelijke grijpers kunnen worden gecombineerd met onze gelede robotarmen. Vanwege de relatief lage belastingscapaciteit van het systeem, moeten de grijpers zo licht mogelijk zijn. Er is een groot scala aan lichtgewicht pneumatische grijpers beschikbaar op de markt, bijv. van de bedrijven SCHUNK, FESTO of bijv. FIPA. Wanneer de gebruik van pneumatische componenten niet wenselijk is, zoals vaak het geval is dan zijn elektrische grijpers noodzakelijk. Er zijn enkele zeer lichte grijpers op de markt, bijv. van GIMATIC, SCHUNK of SOMMER (welke aanzienlijk meer kosten dan de eenvoudige pneumatische grijpers echter). Sinds 2013, levert igus® eenvoudige kunststof grijpers, waarbij de elektromotor zich bevindt in de robolink® buis. Optioneel kunnen grijperbekken hier individueel worden ontworpen.17) Wat kosten verbindingen of "systemen"?
Alle prijzen voor de individuele verbindingen en systemen kunt u vinden in onze catalogus. Als vuistregel kost een "compleet systeem" met motoren, overbrengingen, behuizingen, verbindingen en sensoren iets meer dan €1000 per as. Met andere woorden, ca. €6000 voor een 6 DOF systeem. Een gelede arm ZONDER motoren (maar met sensoren), kost circa de helft hiervan (d.w.z. ca. €500 per as). Voorbeeld:6 DOF ~ €3000

6 DOF ~ €6000

